Bachelor Thesis
Investigation on the Integration of Bosch Rexroth ctrlX Vision App for Dynamic Pick-and-Place Application using 7-axis Kassow Robot Arm with External Camera

Project Background
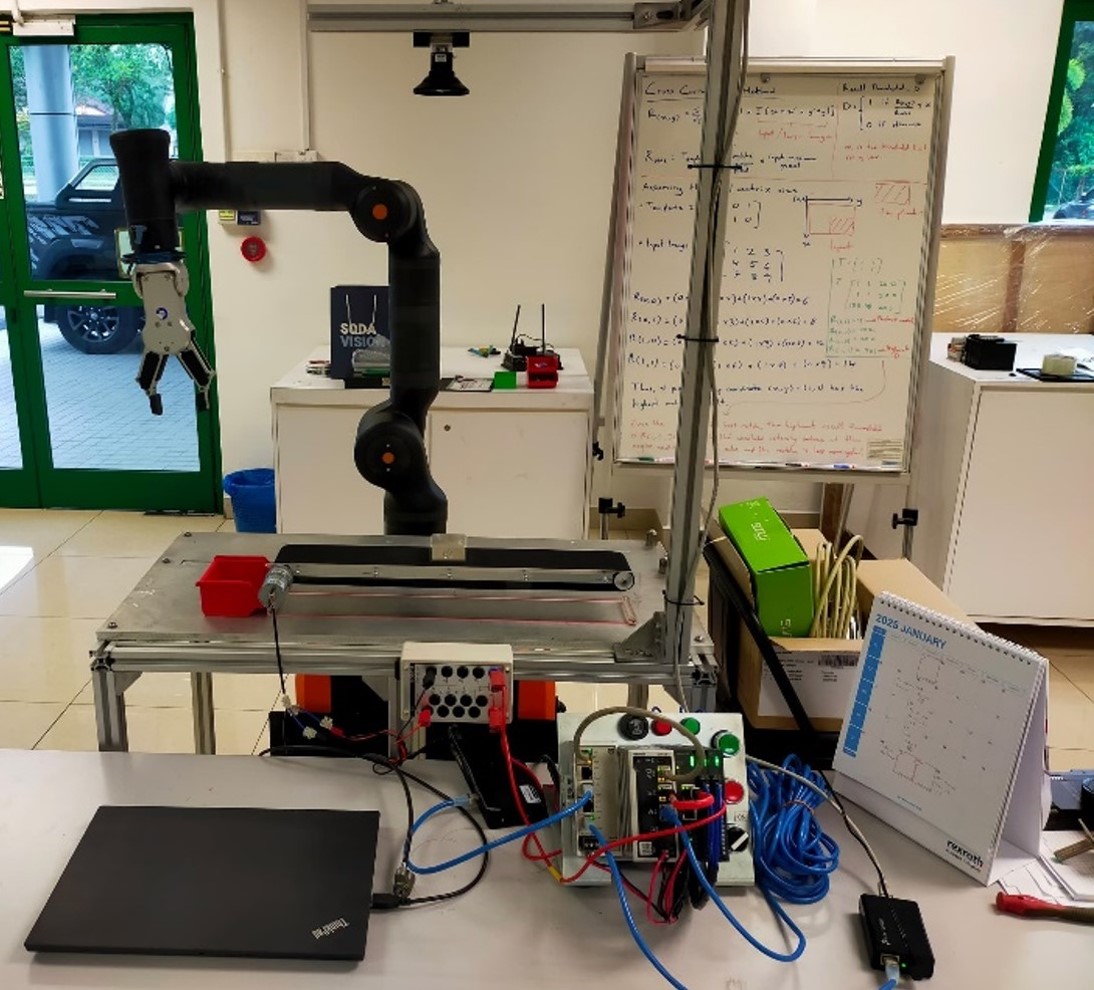
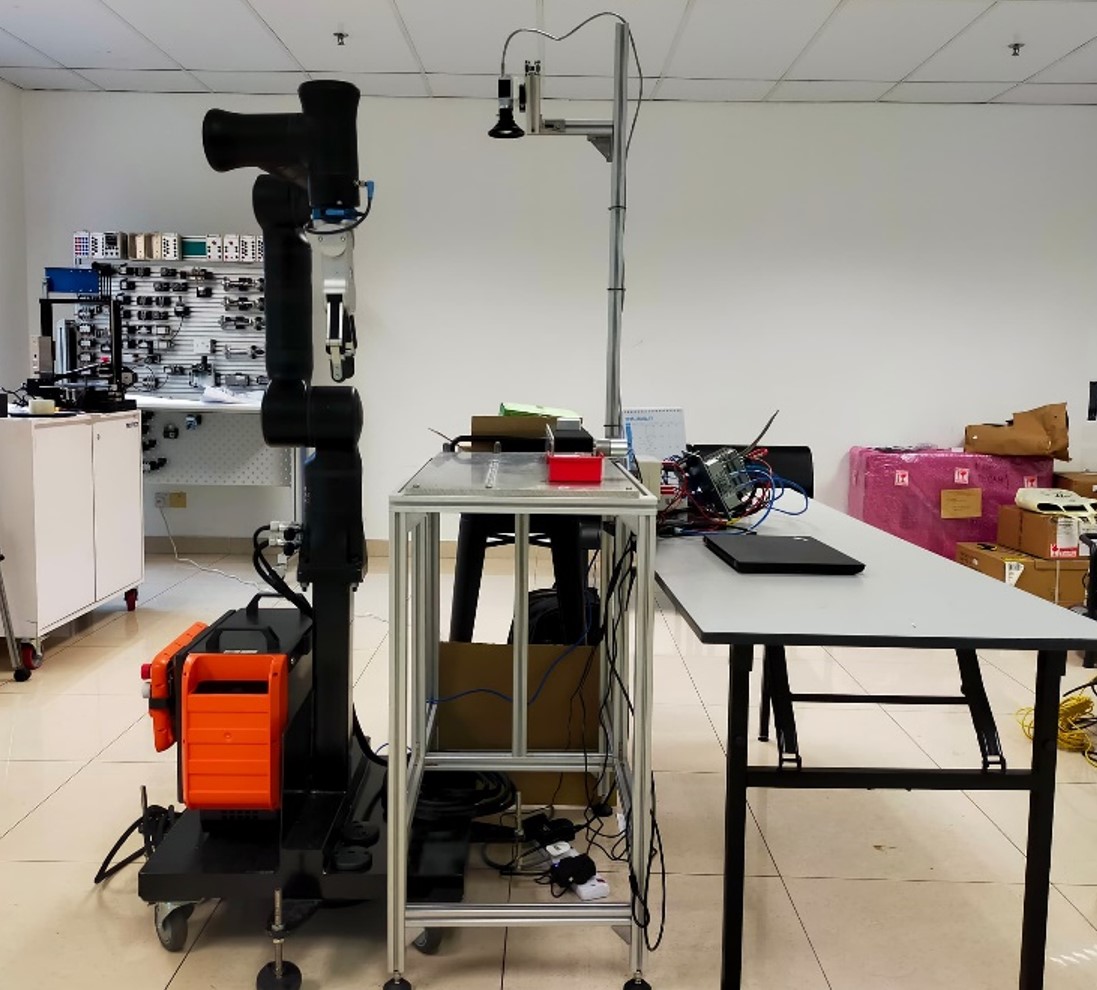
The ctrlX Vision app, developed by Bosch Rexroth. It is a new image processing tool within the ctrlX environment that has not yet commercially available in the market. This bachelor thesis aims to use ctrlX Vision in a dynamic pick-and-place application using a 7-axis Kassow robot arm with an external camera from Basler to demonstrate the ctrlX Vision app potential in real-world industrial scenario for future market deployment.
Objectives
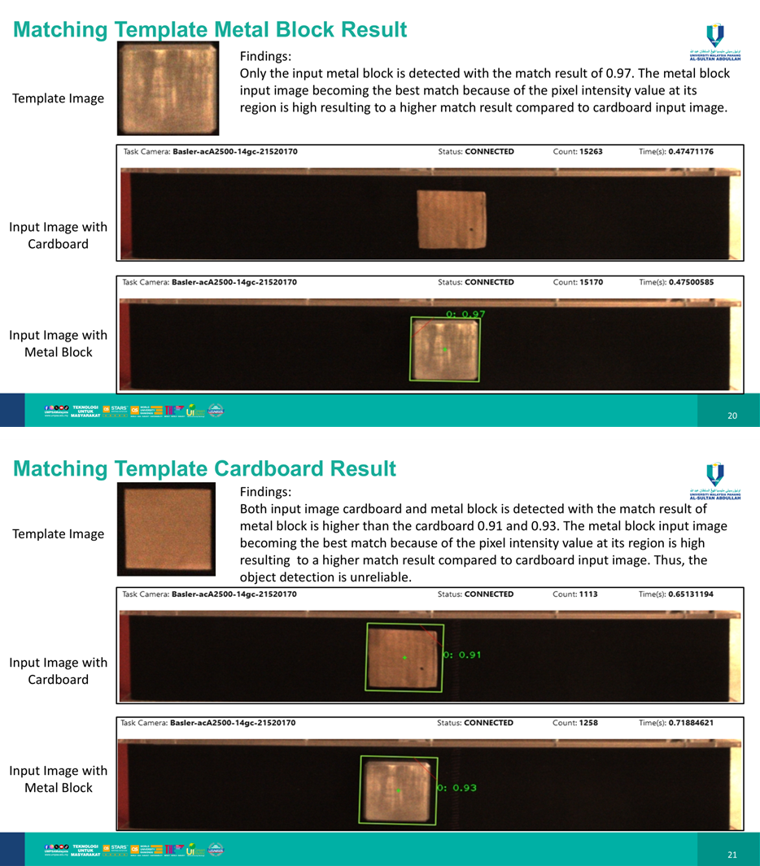
- To test the accuracy of the ctrlX Vision app’s template matching, focusing on how color affects detection reliability.
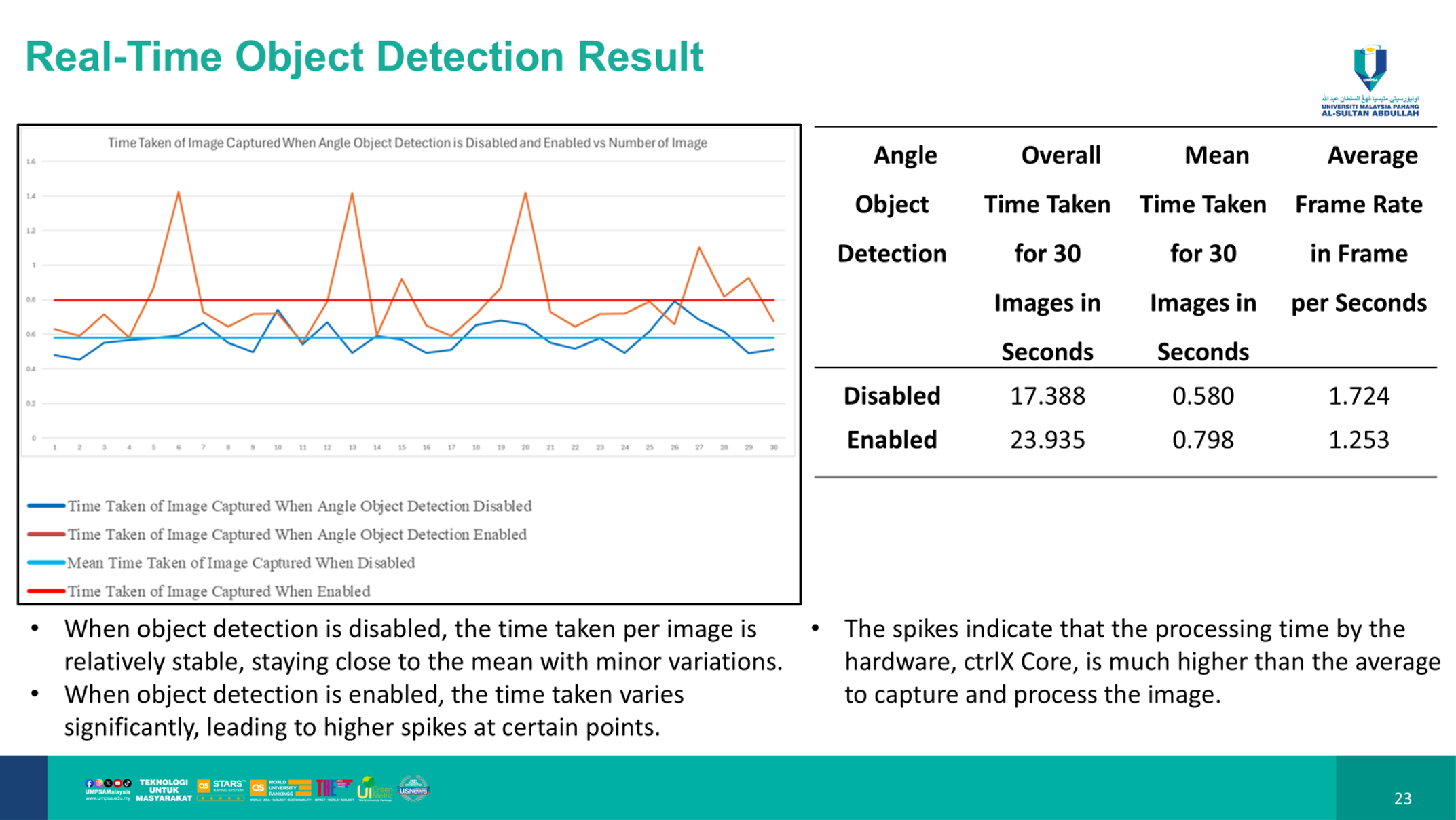
- To analyze the real-time performance of ctrlX Vision app by measuring frame rates when angle object detection feature is enabled and disabled.
- To integrate and test the ctrlX Vision platform with Kassow robot arm and conveyor for real-time pick-and-place operations.
ctrlX Vision App Template Matching Reliability Results
Real-Time Performance of ctrlX Vision App
Project Integration Demo
This project has taught me to solve industrial problem for an a dynamic pick-and-place application. My research on the integration application between ctrlX Vision App with Kassow Robot Arm has contributed to identification of bugs, errors and difficulties which will be used for future improvements.

Wan Muhammad Farees Bin Nazreen
Mechatronics Engineering Graduate
Project Information
- Category Industry and University
- Company Bosch Rexroth Sdn Bhd
- University Hochschule Karlsruhe & University Malaysia Pahang Al-Sultan Abdullah
- Project date October 2024 to February 2025