Diploma Final Year Project
Design and Development of Fully PLC Automated Guided Vehicle for Meal Delivery in Restaurant using Siemens S7-1200

Project Background
Restaurants often face inefficiencies such as long waiting times, excessive staff movement, and workflow disruptions. These issues impact service quality and operational costs. Implementing an Automated Guided Vehicle (AGV) can help address these challenges by:
- Reducing unnecessary movement of staff.
- Minimizing waiting time between food preparation and delivery.
- Improving workflow efficiency by automating the transportation process.
Objectives
- To design and fabricate an Automated Guided Vehicle running fully on S7-1200 PLC.
- To reduce cost by eliminate manpower for order delivery.
- To eliminate wrong delivery order by creating multiple predetermined station.
- To deliver order without human intervention.
Technical Approach
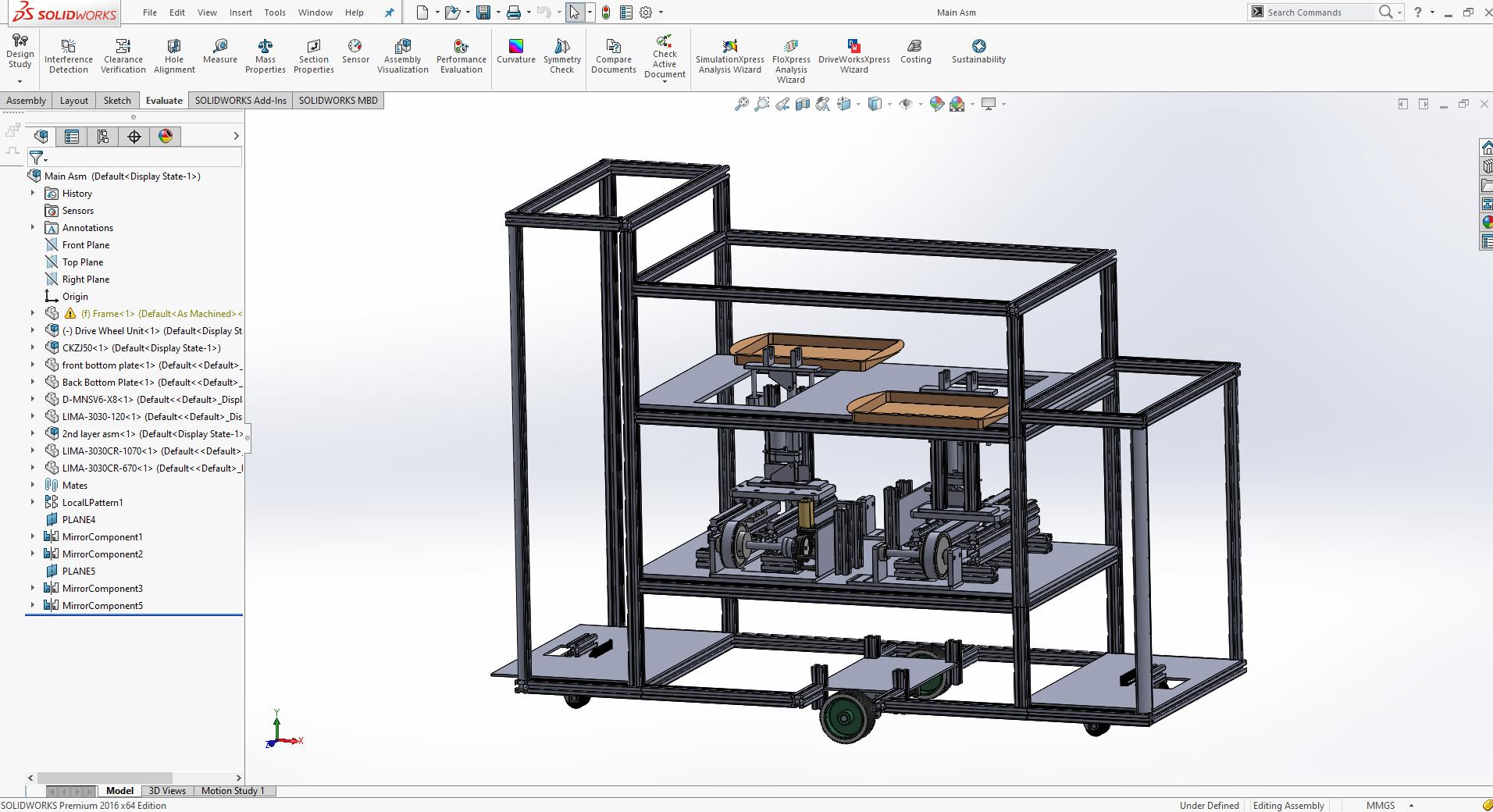
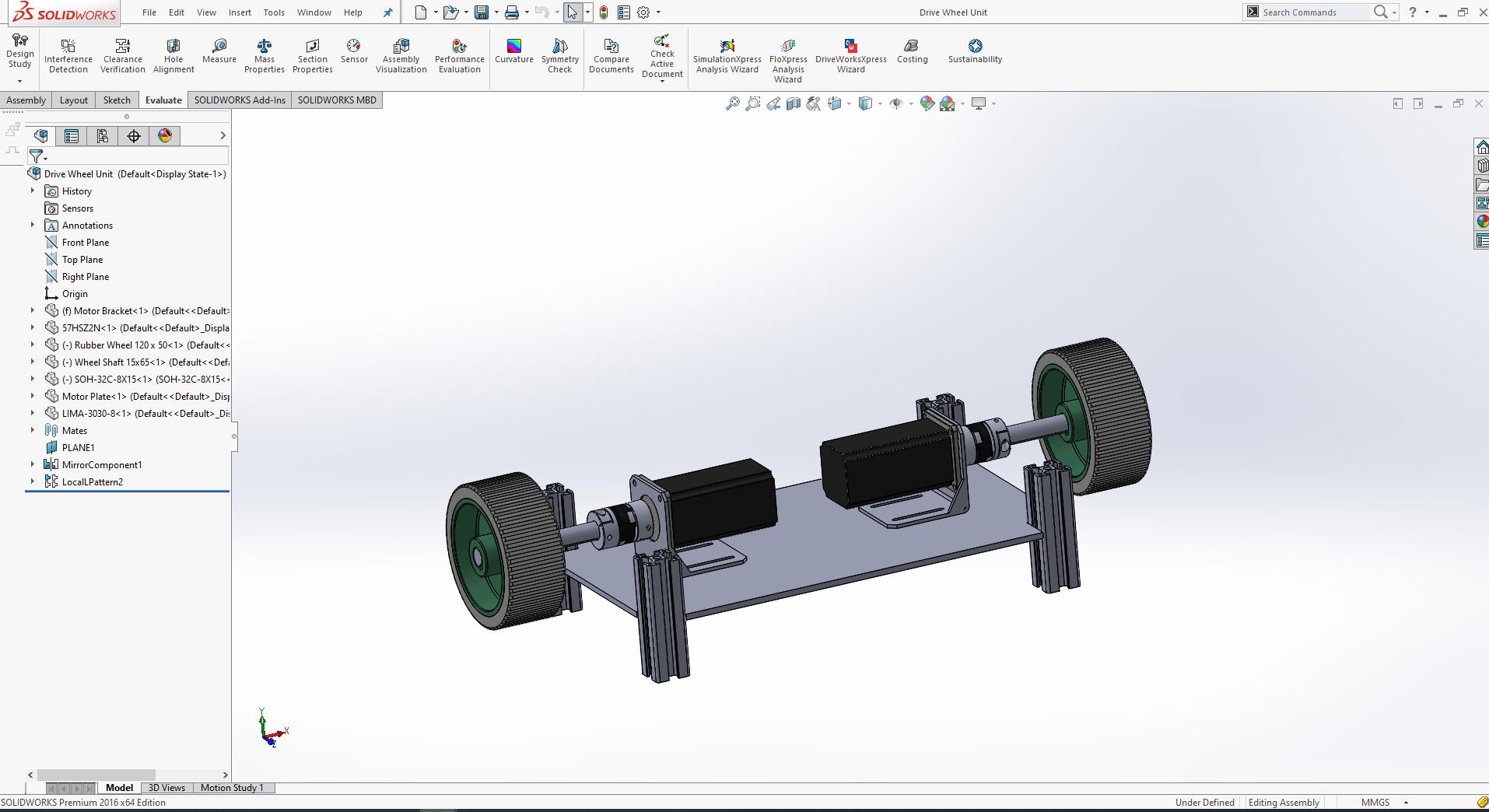
The AGV navigates using a magnetic tape pathway, guided by two 8-bit magnetic sensors mounted at both the front and rear of the robot. It is powered by:
- 2 servo motors for differential drive motion.
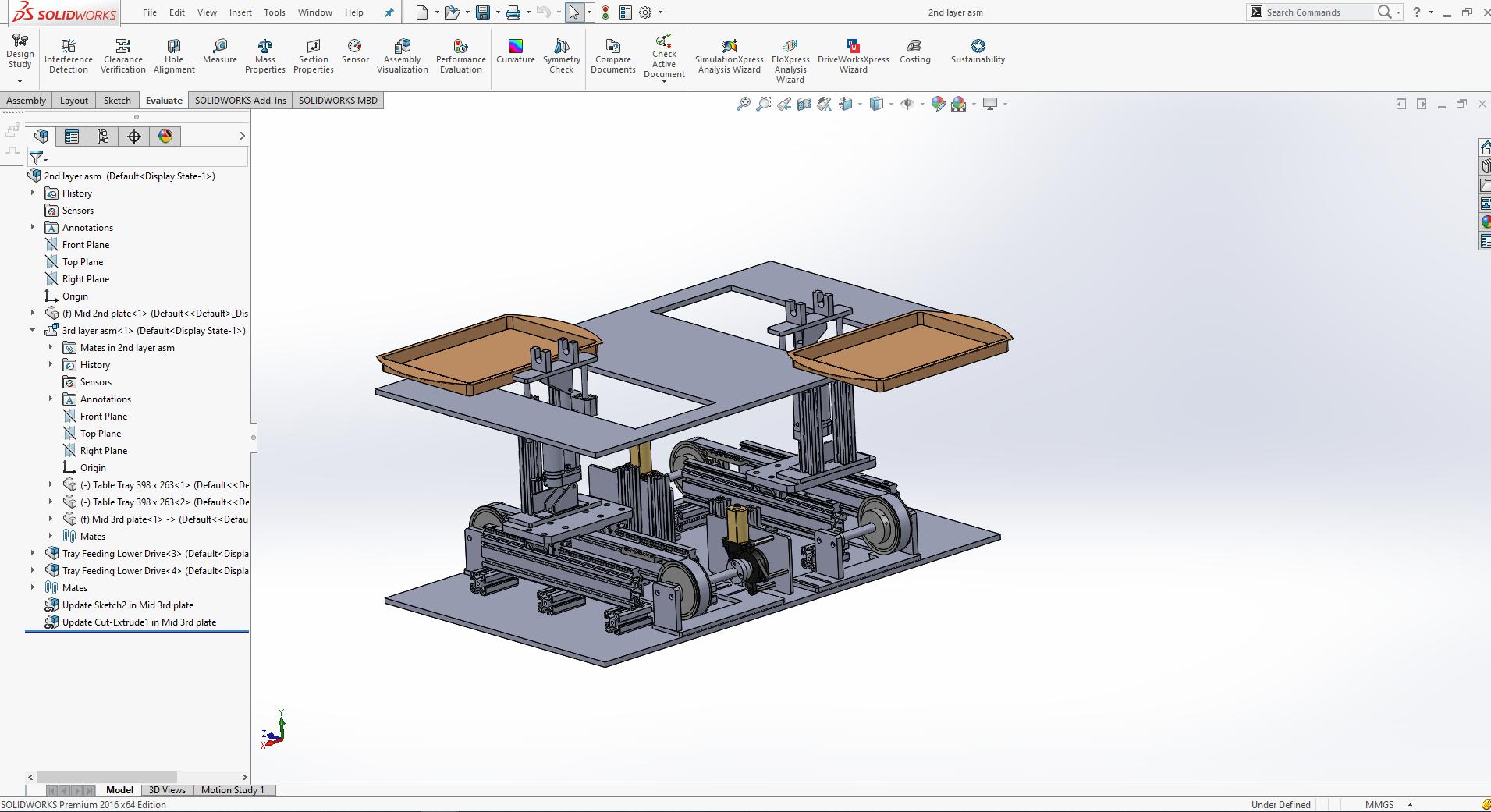
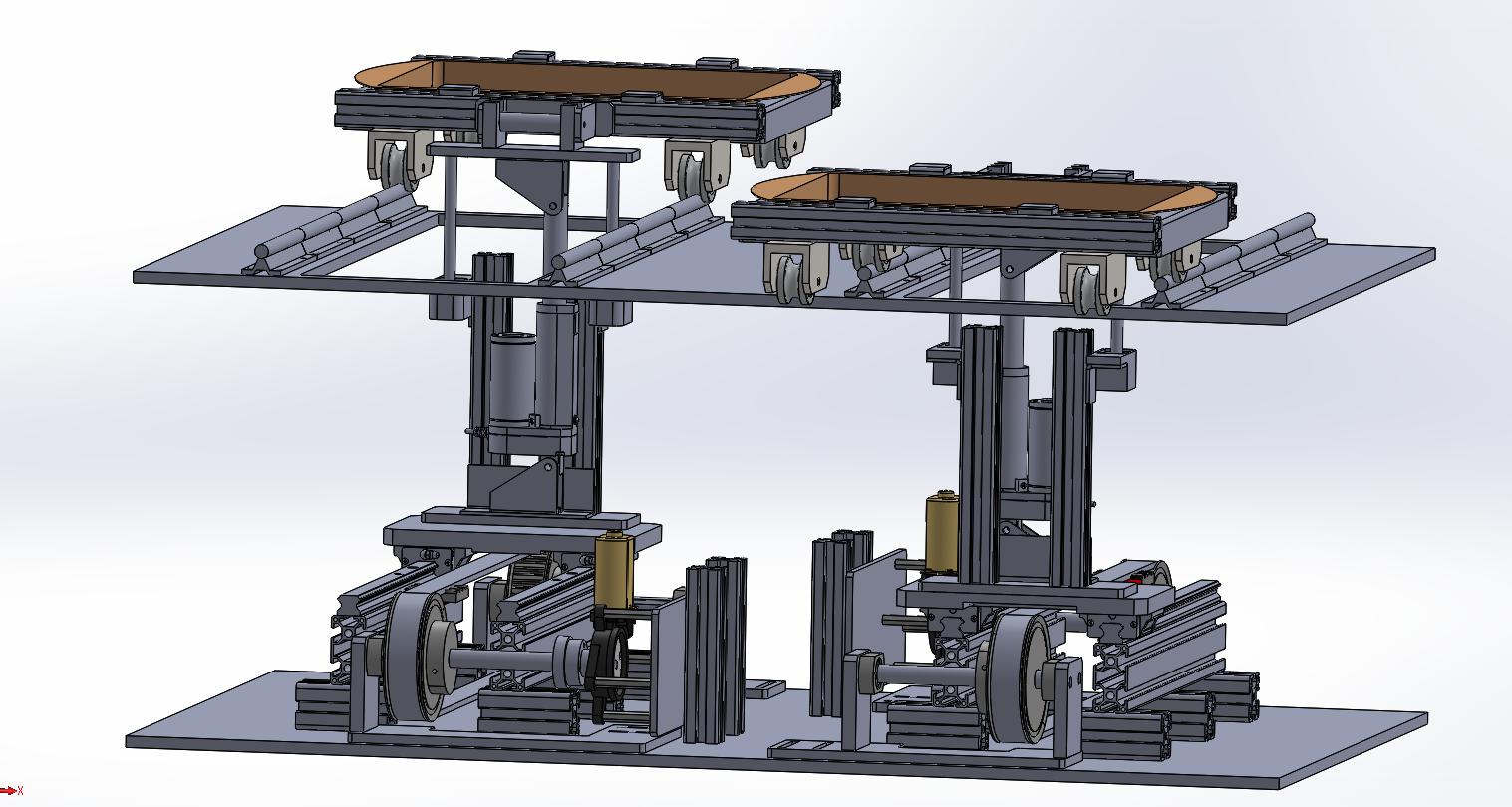
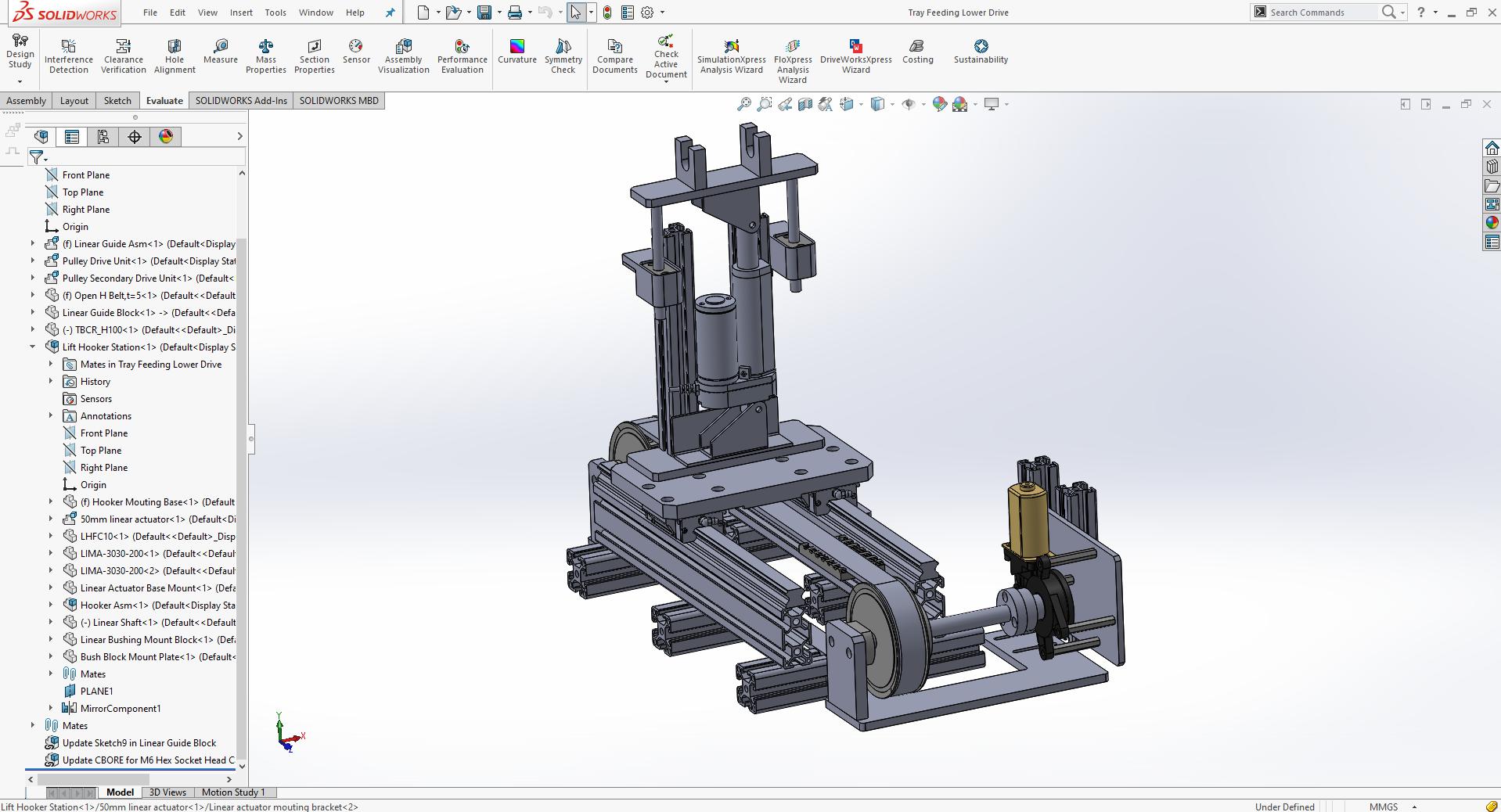
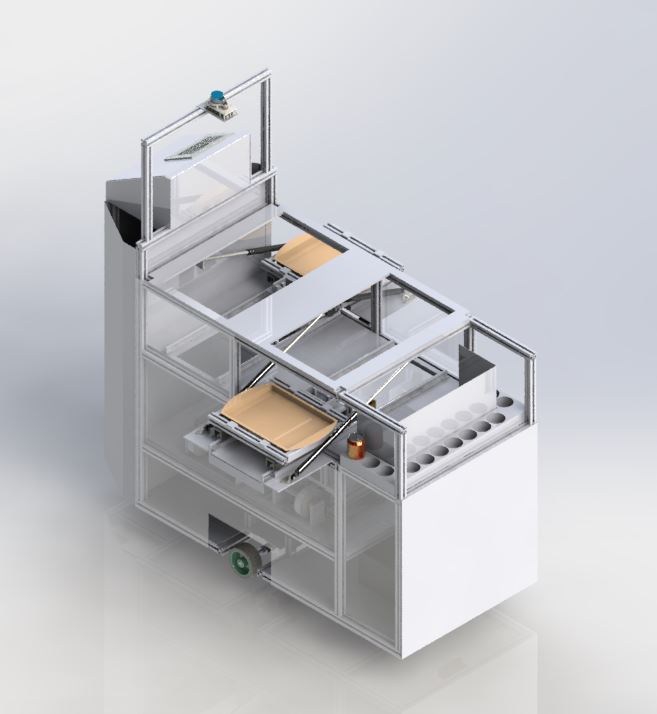
- 2 stepper motors for handling food delivery from the compartment.
- LIDAR for mapping and real-time localization within the working area, allowing monitoring through devices connected to the same network.
By automating food delivery, this AGV enhances restaurant efficiency, reduces operational costs, and improves overall customer experience.
Project Integration Demo
Project Information
- Category University
- University German-Malaysian Institute
- Project date January 2019 to October 2020