Team Oriented Project Study
Design and Development of Autonomous Mobile Robot Platform for Pallet Transportation

 >
>
 >
>
Project Background
Autonomous Mobile Robots (AMRs) are becoming more popular as industries look for ways to automate tasks like moving goods and handling material. However, the market for an indoor and outdoor compatible AMR are still expending. Adaptation of Robot Operating System 2 (ROS2) with Real Time Operating System (RTOS) is a value adding factor for the current robot market.
Objectives
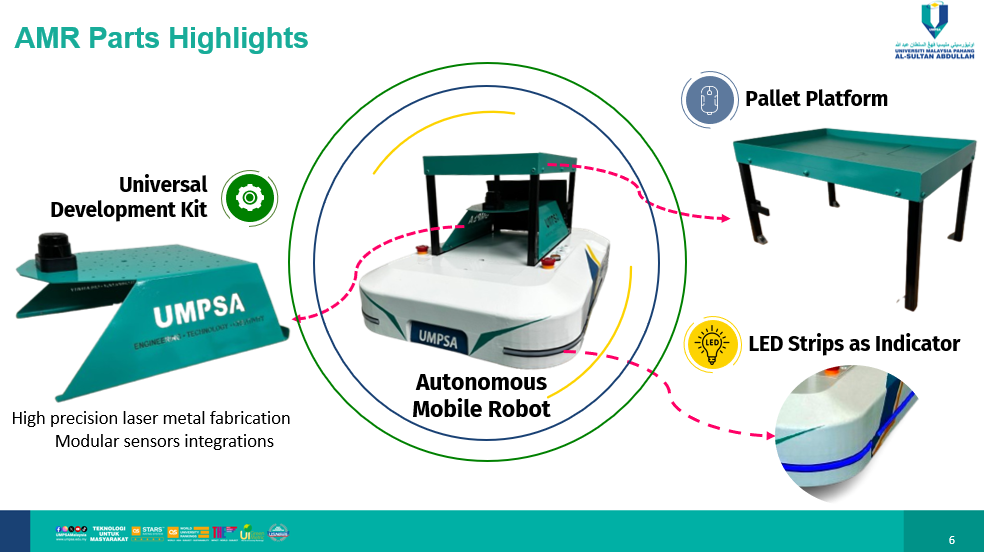
- To design and fabricate an AMR for pallet transportation for indoor and outdoor environment.
- To transport at least 15kg of load from AMR pallet platform.
- To develop a tailored system architecture and schematic design specific to the AMR requirements.
- To develop an autonomous system using software ROS2 and RTOS.
Technical Approach
The AMR will be equipped with a 2D Light Detection and Ranging (LIDAR) sensor for precise mapping and obstacle detection. Integration with ROS2 and RTOS will ensure efficient communication and control of various components.
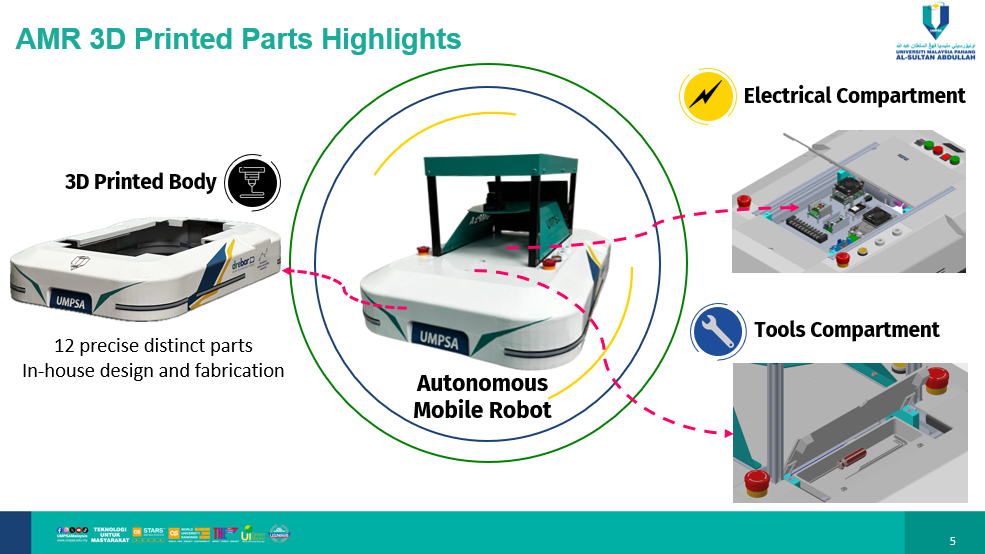
To achieve a balance between durability and functionality, the AMR’s body will be constructed using 3D printing technology. This approach allows for customization, rapid prototyping, and cost-effectiveness.
By automating pallet transportation, this project able to optimize workflow efficiency and reduce work-in-progress (WIP) within industrial environments.
Project Integration Demo
The project is an effort of 4 people. Each of us has a main role to play while supporting each other. I was tasked to design the high-level control of the robot using ROS2 Humble and I have to design the electrical system architecture. It was fun and a challenge to make the sensor fusion, achieve accurate robot odometry and correct robot transformation in ROS2. Given with the time constrain and countless of sleepless nights, we have successfully developed an AMR that is able to transport load more than 15kg in both indoor and outdoor environment.

Wan Muhammad Farees Bin Nazreen
Mechatronics Engineering Graduate
Project Information
- Category University
- University Hochschule Karlsruhe & University Malaysia Pahang Al-Sultan Abdullah
- Project date February 2024 to September 2024